







Описание
Характеристики продукта
-Новый и небольшой форм-фактор
-Больше компьютерной мощности и 2X оперативной памяти, чем предыдущие версии
-Новые датчики с более высокой температурой
-Встроенный вибрации изоляции
-Повышенная Простота в использовании: предварительно установленный с новейшим PX4 (v1.7)
-Дополнительные порты для лучшей интеграции и расширения
Описание продукта:
Pixhawk® 4 является последним обновлением для успешно работающей семьи контроллеров полета Pixhawk. Он разработан и разработан в сотрудничестве с Holybro и командой PX4, оптимизирован для запуска полного стека Dronecode и поставляется предустановленный с последней прошивкой PX4 (v1.7).
Он оснащен в настоящее время самой передовой технологией процессора от ST Microelectronics®, сенсорной технологией от Bosch®, InvenSense® и операционной системой NuttX в реальном времени, обеспечивая невероятную производительность, гибкость, и надежность управления любым автономным транспортным средством.
Микроконтроллер Pixwhawk 4 теперь имеет 2 Мб флеш-памяти и 512кб оперативной памяти. С увеличением мощности и оперативной памяти, разработчики могут быть более производительными и эффективными с их работой по разработке. На автопилоте могут быть выполнены более сложные схемы и модели.
Высокопроизводительные, малошумные IMUs на плате предназначены для стабилизационных приложений. Сигналы, готовые ко всем датчикам, направляются для разделения контактов прерывания и таймера на автопилоте, что позволяет точно штамповать данные датчика. Недавно спроектированные вибрационные изоляции обеспечивают более точные показания, что позволяет автомобилям достигать более высоких результатов полетов.
Два внешних SPI автобуса и шесть связанных чипов выбирают линии позволяют добавить дополнительные датчики и SPI-interface Полезная нагрузка. В общей сложности имеется четыре автобуса с интерфейсом 2c, два-для внешнего использования и два-для последовательных портов gps/модули компаса.
Набор для разработки автопилота Pixhawk 4 идеально подходит для разработчиков в лабораториях по корпоративным исследованиям, стартапах и для студентов (исследования, лекторы, студентов).
Технические характеристики
● Основной процессор FMU: STM32F765
♦ 32 бит Arm® Cortex®-M7, 216 МГц, 2 Мб памяти, 512кб оперативной памяти
● Процессор IO: STM32F100
♦ 32 бит Arm® Cortex®-M3, 24 МГц, 8 КБ SRAM
● На бортовые датчики
○ Accel/Gyro: ICM-20689
○ Accel/Gyro: BMI055
· Mag: IST8310
· Барометр: MS5611
● Gps: ublox Neo-M8N gps/GLONASS приемник; Встроенный магнитометр IST8310
Интерфейсы
● 8-16 PWM сервовыходы (8 от IO, 8 от FMU)
● 3 выделенных PWM/Capture входов на FMU
● Специальный вход R/C для CPPM
● Специальный вход R/C для Spektrum/DSM и S. Bus с аналоговым/PWM RSSI входом
● Выделенный сервопривод S. Bus
● 5 последовательных портов общего назначения
○ 2 с полным контролем потока
○ 1 с раздельным ограничением тока 1,5а
● 3 I2C порты
● 4 шинам SPI
♦ 1 внутренняя высокоскоростная шина датчика SPI с 4 чипами и 6 DRDYs
♦ 1 внутренняя шина с низким уровнем шума SPI, предназначенная для барометра с 2 чипами, без DRDYs
♦ 1 внутренний SPI автобус, предназначенный для FRAM
○ Поддерживает специализированную калибровку SPI EEPROM, расположенную на модуле датчика
○ 1 Внешние шины SPI
● До 2 консолей для двойной банки с последовательным ESC
♦ Каждый CANBus имеет индивидуальные бесшумные элементы управления или ESC RX-MUX управления
● Аналоговые входы для напряжения/тока 2 батареи
● 2 дополнительных аналоговых входа
Электрические данные
Напряжение мощности:
● Выход модуля питания: 4,9 ~ 5,5 В
● Максимальное входное напряжение: 6 В
● Максимальное измерение тока: 120A
● Вход питания USB: 4,75 ~ 5,25 в
● Вход сервопривода: 0 ~ 36 В
Механический данных
● Размеры: 44x84x12 мм
● Вес: 15,8 г
Экологические данные, качество и надежность
● Работая temp. ~ 40 ~ 85C
• Температура хранения. -40 ~ 85C
● CE
● FCC, аддитивного цветового пространства
● Соответствие RoHS (без свинца)
Посылка в комплекте(20034 и 20035)

Pixhawk4 * 1
Pixhawk4 gps модуль*1
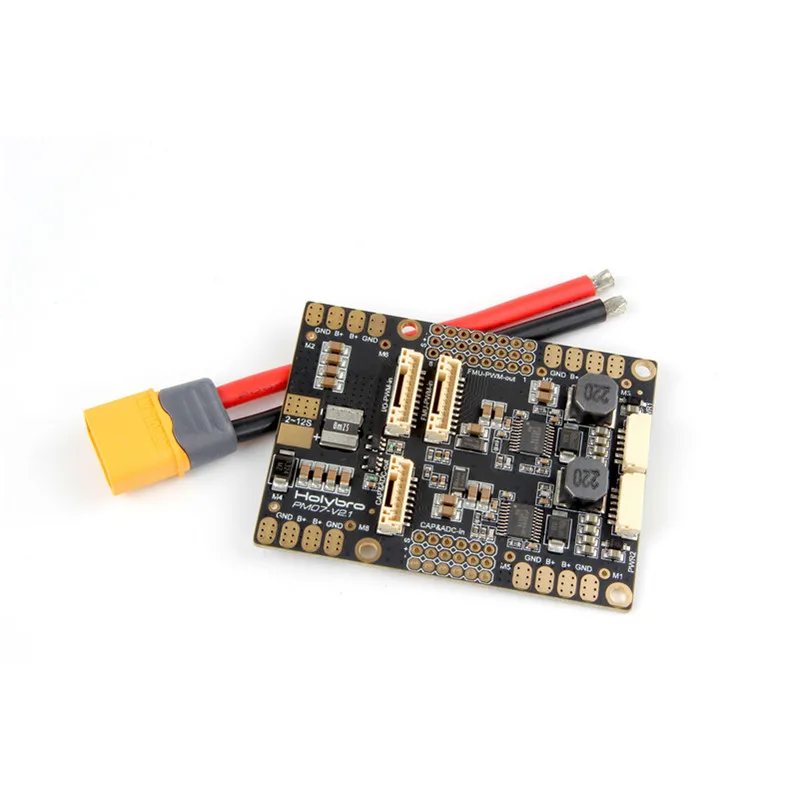
Pixhawk 4 Плата управления питанием*1
I2C сплиттер доска*1
6-6 pin кабель (источник питания)*3
На возраст от 4 до 4 pin кабель (CAN)*2
6-4 pin кабель (кабель для передачи данных)*1
От 10 до 10 пин кабель (ШИМ)*2
От 8 до 8-ми штифтовый кабель (AUX)*1
PPM/SBUS out кабель*1
XSR кабель-приемник*1
DSMX кабель-приемник*1
SBUS кабель-приемник*1
USB кабель*1
'X'type складной держатель постамента*1
70 мм и 140 мм углеродный стержень, стойка ВЫКЛ*2
6*3 2,54 мм Шаг горизонтальный палец*1
8*3 2,54 мм Шаг горизонтальный палец*1
Набор пены*1
Pixhawk4 руководство по быстрому запуску*1
Gps руководство по быстрому запуску*1
Руководство по быстрому запуску платы управления питанием*1

Pixhawk4 * 1
Pixhawk 4 Плата управления питанием*1
I2C сплиттер доска*1
6-6 pin кабель (источник питания)*3
На возраст от 4 до 4 pin кабель (CAN)*2
6-4 pin кабель (кабель для передачи данных)*1
От 10 до 10 пин кабель (ШИМ)*2
От 8 до 8-ми штифтовый кабель (AUX)*1
PPM/SBUS out кабель*1
XSR кабель-приемник*1
DSMX кабель-приемник*1
SBUS кабель-приемник*1
USB кабель*1
6*3 2,54 мм Шаг горизонтальный палец*1
8*3 2,54 мм Шаг горизонтальный палец*1
Набор пены*1
Pixhawk4 руководство по быстрому запуску*1
Руководство по быстрому запуску платы управления питанием*1
Некоторые советы:
Https://docs.px4.io/en/flight_controller/pixhawk4.html
Просмотров:
Pixhawk4 руководство по быстрому запуску
Pixhawk4 gps руководство по быстрому запуску
PM07 руководство по быстрому запуску
Pixhawk4 технический паспорт
Pixhawk4 выводов





Характеристики
- Бренд
- holybro
- Материал
- Комбинированный материал
- Габаритные размеры
- /
- Расходный материал для инструментов
- Сборное стекло
- Периферийные устройства для дистанционного управления
- Приемники
- Характеристики
- Сборка
- Номер модели
- Pixhawk 4
- Тип транспорта
- Подводная лодка
- Детали для тюнинга и запчасти
- Переходник
- Детали дистанционного управления и комплектующие
- Регуляторы скорости
Сопутствующие товары







